FlexBotNDT – Flexible zerstörungsfreie Prüfung mit kollaborierenden Robotern (Flexible non-destructive testing using collaborative robots)

Die Zerstörungsfreie Werkstoffprüfung (ZfP) ist ein unverzichtbarer Bereich der Qualitätssicherung.
Die Werkstoffprüfung umfasst unterschiedliche Prüfverfahren, mit denen das Verhalten und die Werkstoffkenngröße normierter Werkstoffproben oder fertiger Bauteile unter mechanischen, thermischen oder chemischen Beanspruchungen ermittelt werden. Ein Werkstoff wird dabei z. B. hinsichtlich seiner Reinheit, Fehlerfreiheit oder Belastbarkeit überprüft. Die gängigen Prüfverfahren werden aufgeteilt in zerstörende und zerstörungsfreie Werkstoffprüfungen.
Mithilfe der ZfP ist es möglich, Aussagen über die Beschaffenheit der Werkstoffe zu treffen, ohne diese zu schädigen. Oft geht es dabei um Anomalien, äußere Merkmale an Guss- und Schmiedeteilen oder die Struktur eines Grundwerkstoffs.
Daher hat sich das Gebiet der zerstörungsfreien Prüfung entwickelt. Je nach Prüfaufgabe stehen unterschiedliche Methoden zur Verfügung:
- Sichtprüfung (VT)
- Farbeindringprüfung (PT)
- Wirbelstromprüfung (ET)
- Thermographische Prüfungen (TT)
- Magnetpulverprüfung (MT)
- Ultraschallprüfung (UT)
Das Ultraschallverfahren eignet sich, um Bauteile bis in die Tiefe zu prüfen. Mit dem Verfahren kann eine Vielzahl von Materialien komplett „durchleuchtet“ werden. Dazu wird ein Messkopf mit Ultraschallsender und Empfänger auf das Prüfteil aufgesetzt. Der im Messkopf erzeugte Ultraschall wird durch ein Koppelmedium, je nach Material kann dies beispielsweise Öl (Metal) oder Hydrogel (Verbundsstoffe) sein, in das Prüfteil transportiert. Eine gute Kopplung ist wichtig für eine effektive Prüfung.
Der Ultraschall durchdringt den Prüfkörper und es entstehen Echos der Ultraschallwellen durch Reflexionen an der Rückwand. Fehlstellen, wie Risse oder Einschlüsse, führen zu einer zusätzlichen oder verfrühten Reflexion des Ultraschalls. Diese werden im Prüfkopf erfasst. Die Art und Größe der Reflexionen lassen Rückschlüsse zu, wo sich die gefundene Anomalie im Prüfkörper befindet. Die Herstellung von Ultraschallprüfköpfen ist sehr aufwändig. Zudem benötigt man aufgrund des Koppelmediums geschlossene Anlagen. Weiter muss das Koppelmedium möglichst frei von Verunreinigungen und Blasenbildung sein, da diese den Schallweg des Ultraschalls stören und wie ein Materialfehler wirken.
Der aktuelle IST-Zustand
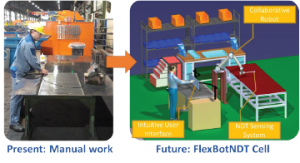
Die Ultraschallprüfung ist ein wesentlicher Bestandteil der Qualitätskontrolle in der Stahlindustrie, um Fehler im Material zuverlässig und genau erkennen zu können. Eine kritische Aufgabe, welches nur langjährig geschultes Fachpersonal, durchführen kann. Aktuell wird die Prüfung mit einer Sonde manuell durchgeführt welche über die Oberfläche gleitet. Gerade bei großflächigen Bauteilen ist diese Prüfung schwer durchzuführen.
Das Projektteam bestehend aus Awesome Technologies, JOANNEUM RESEARCH ROBOTICS, Ondosense, LMS und Voestalpin, sucht im Projekt FlexBotNDT, welches durch das EIT Manufacturing gefördert wird, nach einer human-centered-Lösung um die Qualitätskontrolle auf das nächste Level zu bringen. Die Projektidee dahinter ist es eine Kombination von zerstörungsfreien Prüfgeräten und kollaborierenden Robotern zu entwickeln, welche die BedienerInnen von der monotonen Scanarbeit entlastet und sich auf die wichtige Datenauswertung konzentrieren können. Interessant ist dieses Projekt für potentielle KundInnen in der Stahl-, Luft- und Raumfahrtbranche, sowohl mittelständisch wie auch große Konzerne betreffend.
Informationen zu den Projektpartnern:
Awesome Technologies kümmert sich um die Aufgaben des Vertriebs und Marketings, sowie die finale Integration in Unternehmen.
LMS, mit Sitz in Griechenland übernimmt die Projektleitung, sowie die Entwicklung des Userinterfaces (UI) und der Steuerung (UR).
Ondosenehat einen innovativen 3D-Radarsensor zur Kollisionsvermeidung entwickelt, welcher auch in den schwierigsten Umgebungen zuverlässig arbeitet und eine datenschutzkonforme Erkennung der menschlichen Anwesenheit ermöglicht, wodurch keine Roboterzellen mehr benötigt werden, sondern eine Mensch-Roboter-Interaktion stattfinden kann.
Joanneum Research Robotics entwickelt einen Endeffektor, mit welchem die Sonde dann am Cobot befestigt werden kann.
Voestalpinist der Use-Case Geber und testet das fertig entwickelte Endprodukt die Qualität der Bleche und Stahlträger.
Das ganze Projekt wird gefördert durch das EIT Manufacturing.
Aktuell erreichte Meilensteine
- Das Robotersystem ist für die Vermarktung durch den Geschäftsinhaber verfügbar.
- Robotersystem
- Wahrnehmungs-/Sichtsystem
- NDT-Ultraschallsystem
- Sicherheitskonzept und periphere Systeme
- Programmierung und Mensch-Roboter-Interaktionssystem
Kurzübersicht
Name des Projekts: FlexBotNDT (Flexible non-destructive testing using collaborative robots)
Starttermin: 01. Januar 2022
Endtermin: 31. Dezember 2022
Ansprechpartner/ Projektträger (mit Logo): Ondosense, Joanneum, Voestalpin, Awesome, LMS, EIT Manufacturing
Ausgangslage: Die Ultraschallprüfung ist ein wesentlicher Bestandteil der Qualitätsprüfung in der Stahlindustrie, um Fehler im Material zuverlässig und genau zu erkennen und sichtbar zu machen. Es handelt sich jedoch um eine kritische Aufgabe, und die Personen, die die Prüfung durchführen, sind meist hochqualifizierte Experten. Daher sind diese Leute schwer zu finden und oft ist die Ultraschallprüfung ein Engpass in der Werkstatt. Während des eigentlichen Prüfverfahrens nutzt der UT-Experte nur einen Bruchteil seiner Zeit, nämlich für die Interpretation der Ergebnisse und die Analyse der festgestellten Anomalien. Die Bewegung der Sonde über die Oberfläche und die Protokollierung und Dokumentation der Ergebnisse ist der größte Zeitaufwand.
Kurzbeschreibung: Mit diesem Projekt wollen wir uns auf die Expertise und den Wert des Menschen in der Schleife konzentrieren und die Experten von der monotonen und langwierigen Arbeit des Bewegens der Sonde über die Oberfläche entlasten, indem wir kollaborative Roboter für diese Aufgabe einsetzen. Darüber hinaus sollen die Messergebnisse automatisch protokolliert werden und der Anwender kann sich voll und ganz auf die Interpretation und Freigabe der erkannten Anomalien konzentrieren.
Ziele: Entlastung des Bedieners von der monotonen Scanarbeit – er kann sich auf die Datenauswertung konzentrieren.
Gesamtziel: Mensch-Maschine-Kooperation für eine sozial nachhaltige Fertigung auf Basis flexibler ZfP-Experten.

![]()

![]()


