TASTINN VR ist ein Kooperationsprojekt der Awesome Technologies Innovationslabor, dem Lehrstuhl für Robotik und Telematik der Julius-Maximilians Universität Würzburg und dem Fraunhofer-Institut für Silicatforschung Würzburg. In diesem Projekt wurde ein intuitives VR-System für die Fernbedienung von mobilen Robotern und Spezialmaschinen entwickelt. Sensordaten und erzeugte 3D-Umgebungsmodelle bekommen die BedienerInnen über eine VR-Brille dargestellt und steuern die Systeme über einen neuartigen Sensor-Handschuh mit Kraftrückmeldungen.
 Die Motivation
Die Motivation
Die Bedienung von Spezialmaschinen und mobilen Robotern im Bergbau, unter Wasser und auf dem Mond – häufig ist keine direkte Sichtverbindung zwischen BedienerIn und Maschine vorhanden – ist mit einigen Schwierigkeiten verbunden. Da hierbei der räumliche Bezug häufig verloren geht, sind die Informationen zur Steuerung der Maschine oft nicht intuitiv für den Menschen interpretierbar. Auch eine potenzielle Zeitverzögerung in der Übertragung kann vorkommen, die Menschen nur bedingt in der Fernbedienung kompensieren können. Woraus eine aufwendige und kostspielige Handhabung resultiert, die zu kritischen Bedienfehlern führen kann.
Die Innovation
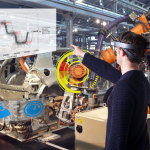
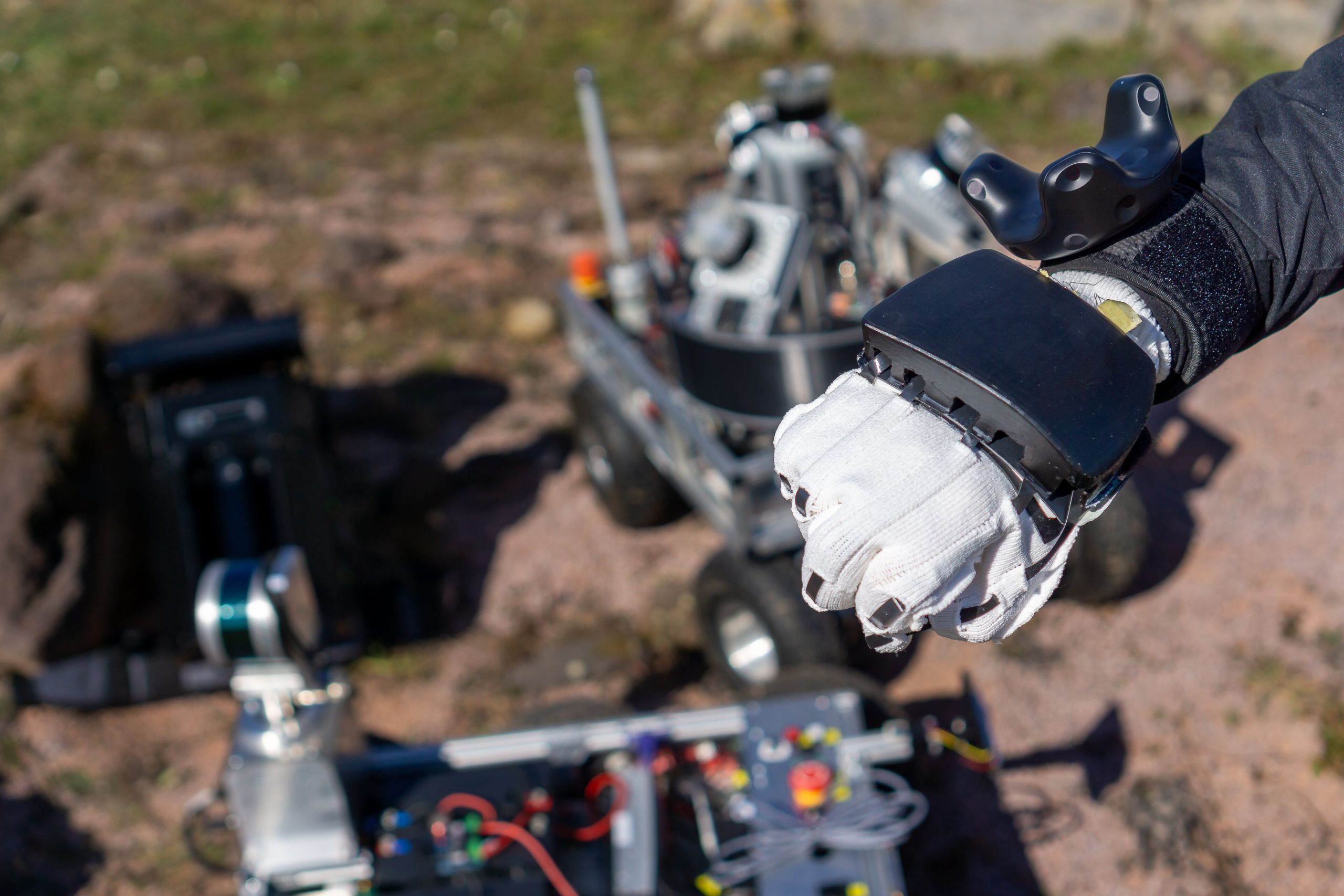
Neuerungen aus diesem Projekt sind die Entwicklung von zwei mobilen 3D-Kartierungssystemen, die in Echtzeit ein 3D-Modell der Einsatzumgebung erzeugen. Das entwickelte VR-System bündelt alle gesammelten Sensordaten des zu steuernden Roboters (3D-Umgebungsmodell, Bilddaten, Bewegungsdaten, Pfade, Zielvorgaben, Sensormessungen) und stellt diese leicht verständlich in einer konsistenten 3D-Umgebung dar. Probleme wie Zeitverzögerung können hierdurch ausgeglichen werden, da die BenutzerInnen ohne Verzögerung in der Virtual Reality mit dem Sensormodell arbeiten und Befehle vorgeben können. Das Modell aktualisiert sich fortlaufend anhand der eintreffenden, zeitverzögerten Daten des ferngesteuerten Systems. Mit dem entwickelten Sensor-Haptik-Handschuh wird eine intuitive Bedienung mit den Händen und Fingern ermöglicht. Elastische Druck- und Haltungssensoren an den Fingern wurden in einen sehr komfortablen Handschuh integriert. Neu entwickelte Aktuatoren bremsen gezielt die Fingerbewegungen, um das Greifen fühlbar zu machen.
Die Fernbedienung von mobilen Robotern in der Virtual Reality mit dem TASTSINN VR- Sensor-Haptik-Handschuh erhöht die Sicherheit und vereinfacht die Steuerung durch ein besseres Situationsbewusstsein. Wie das genau funktioniert, können Sie in unserem Video zur Fernsteuerung mobiler Roboter mit Virtual Reality sehen.
Kooperationspartner